thesis: Motion tracking in field sports using GPS and IMU
- M. Roobeek, Delft university of technology
1. Introduction
1.2 Background
2. Methods and materials
2.2. Sensors
2.2.1 Inertial Measurement Unit(IMU)
2.3 Filters
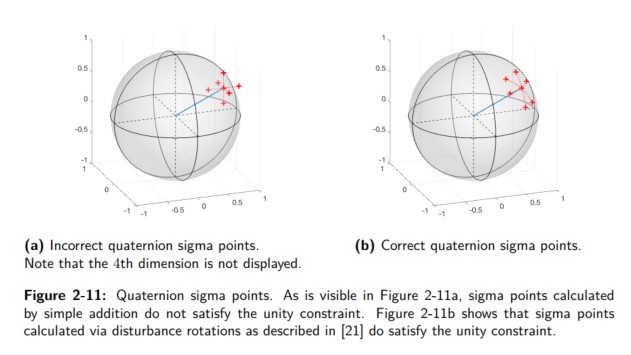
2.3.1 Unscented Kalman Filter (UKF)
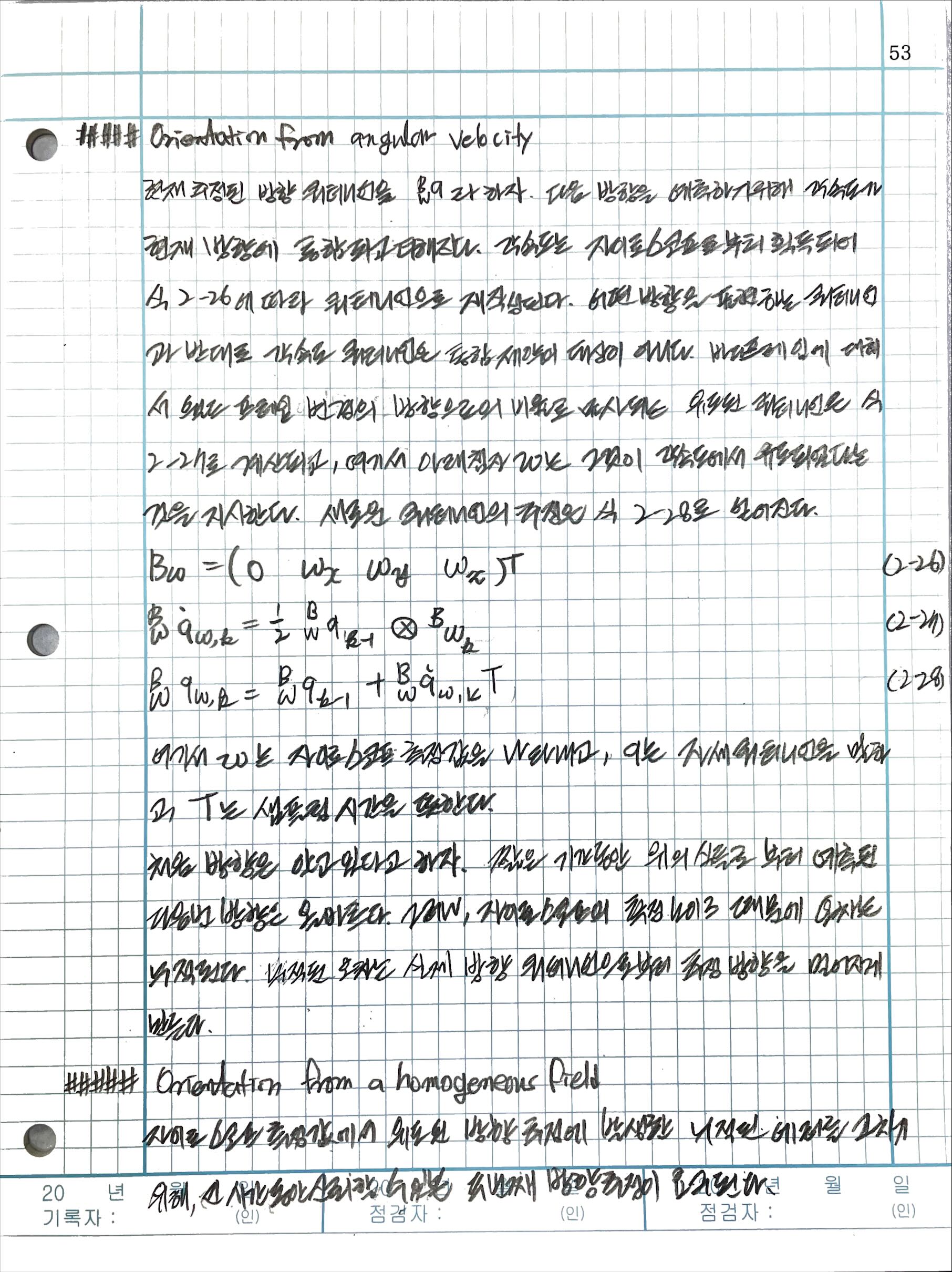
2.3.2 Madgwick filter
Orientation from angular velocity
Orientation from a homogeneous field
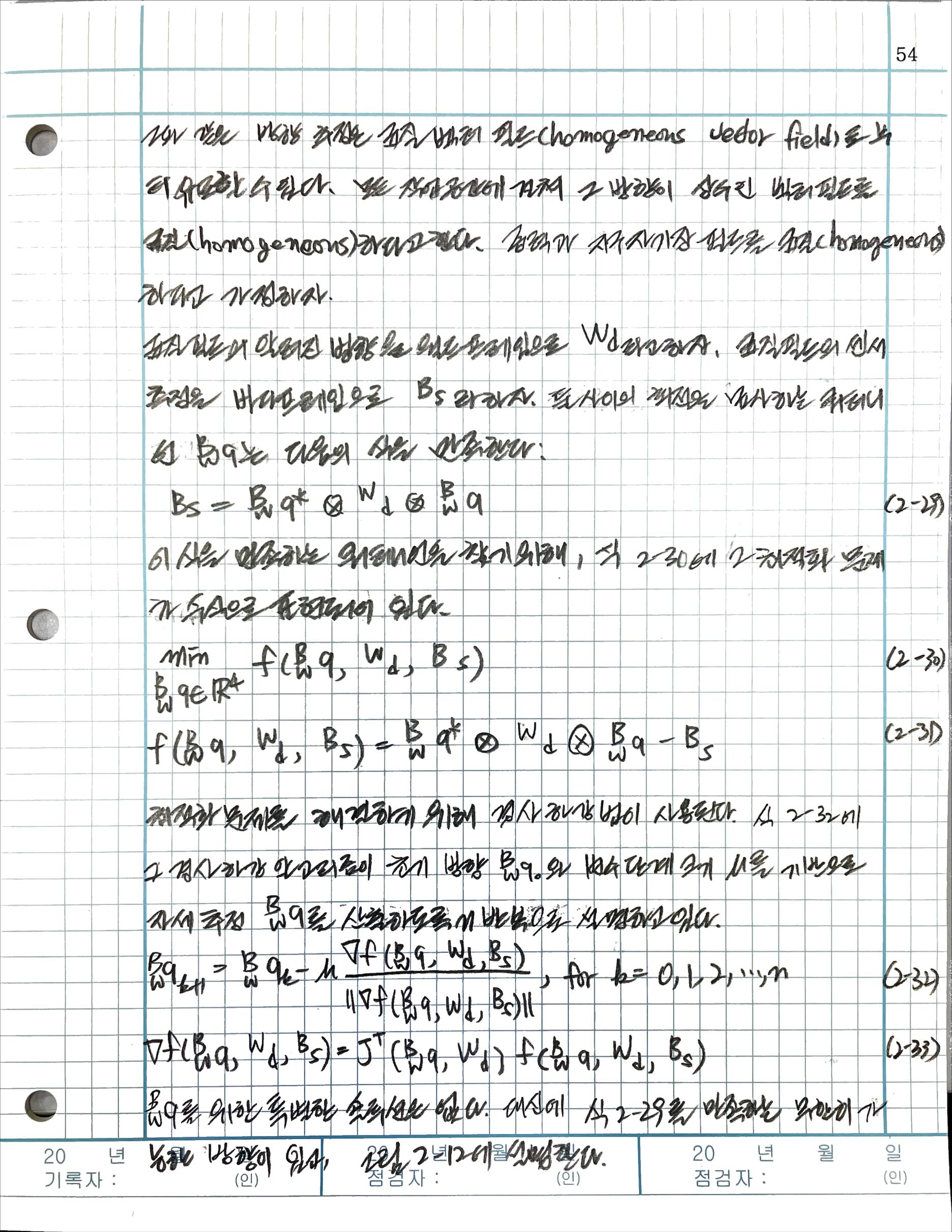
Orientation from a homogeneous field
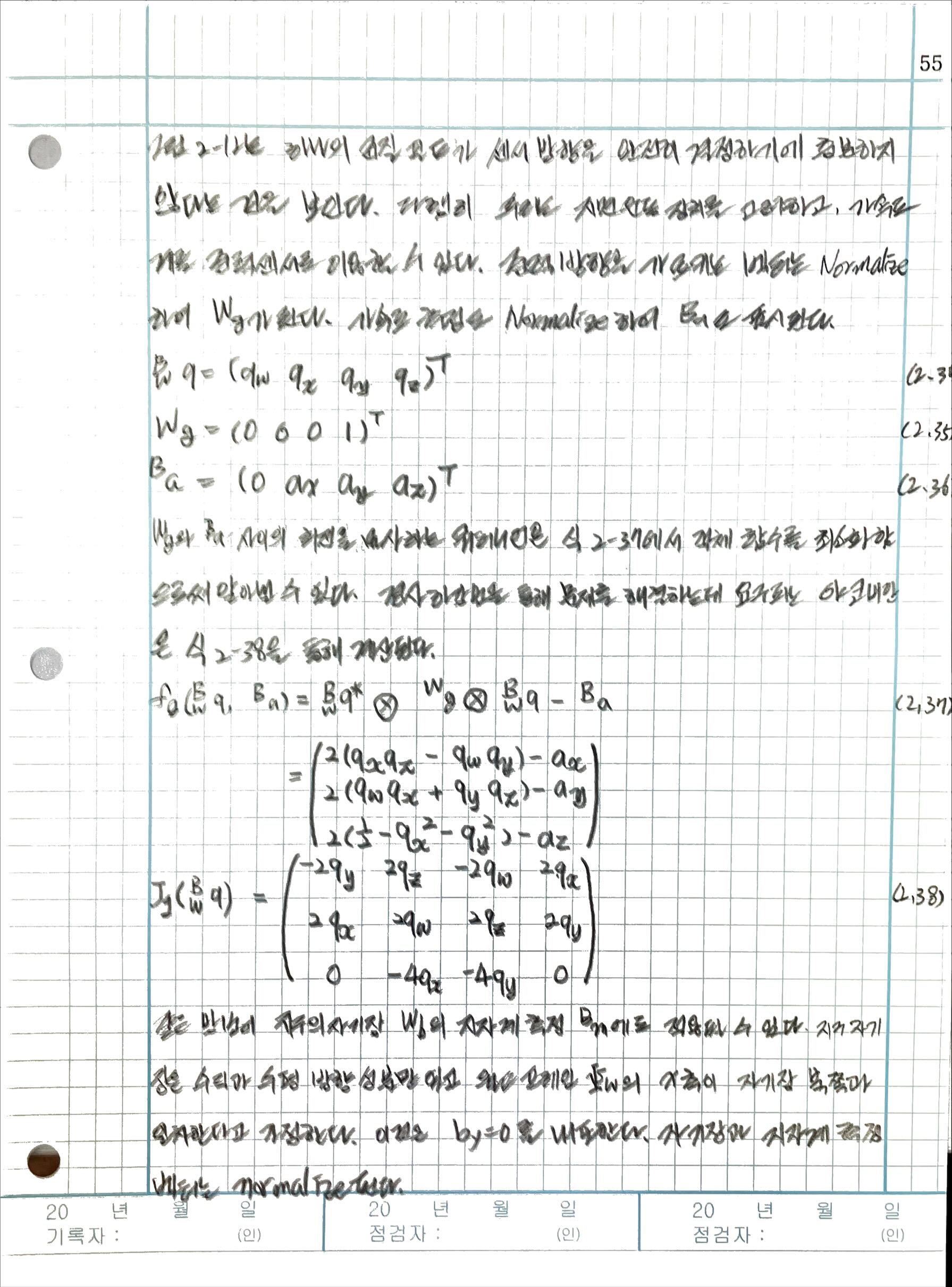

Fusion process
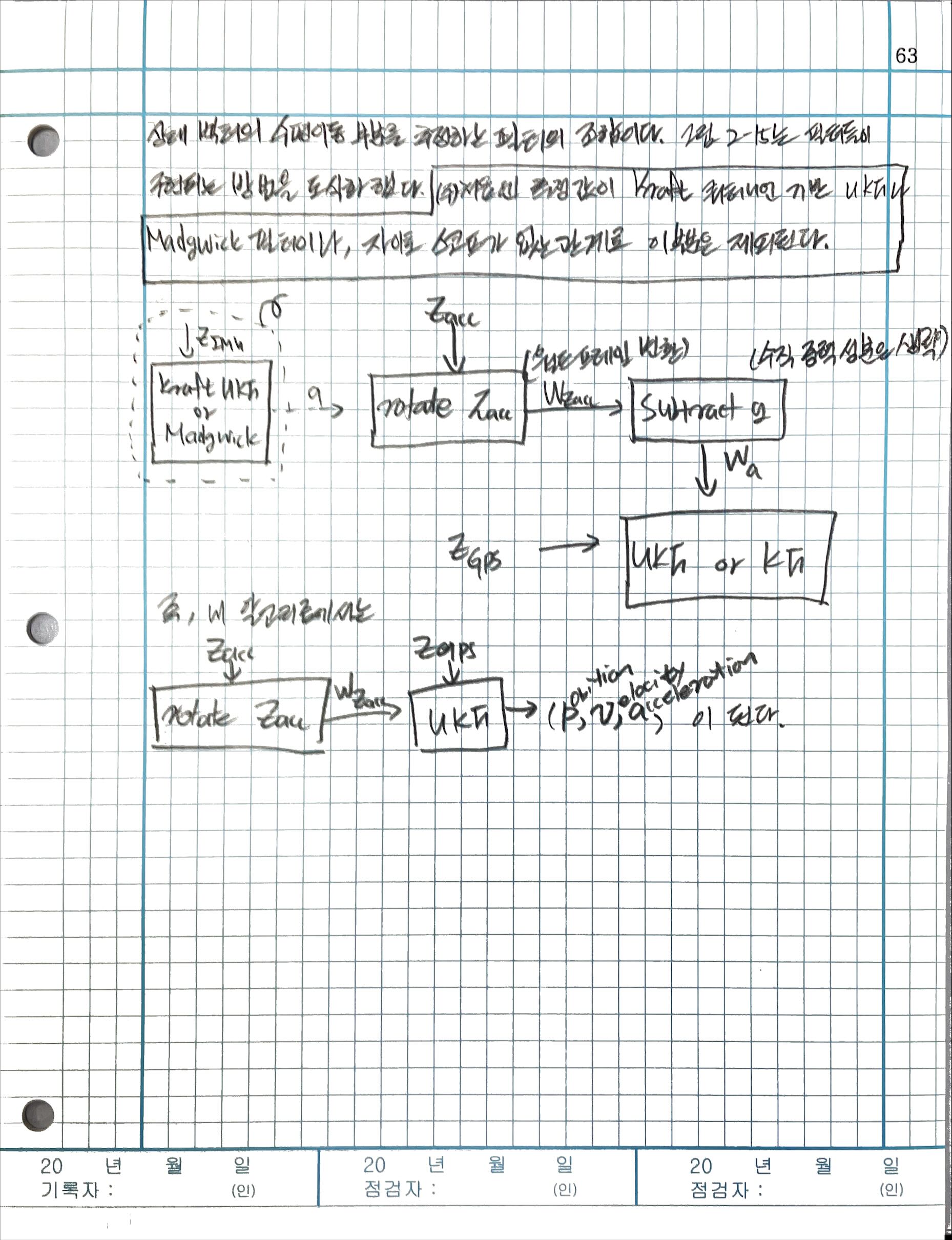
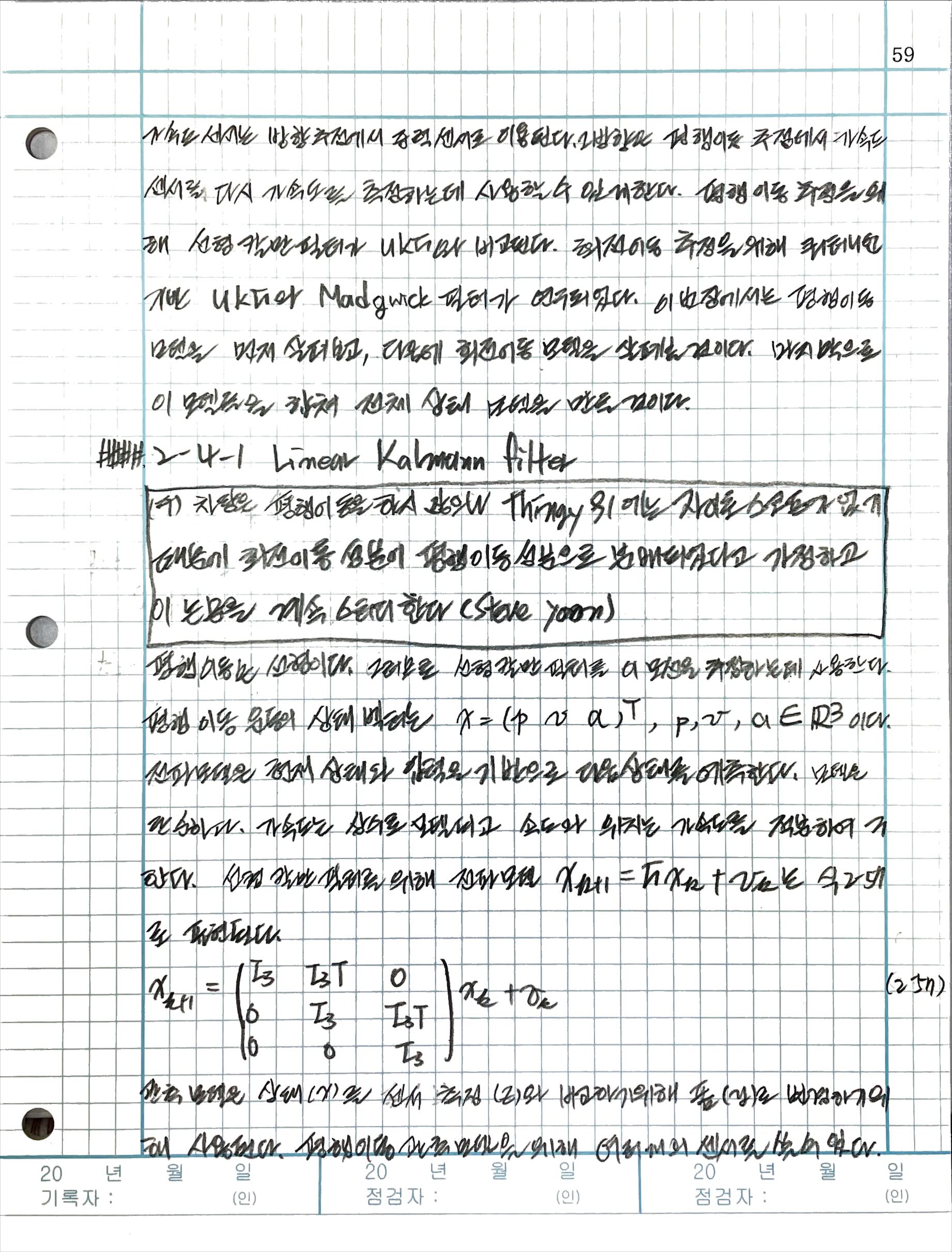
2-4 Models
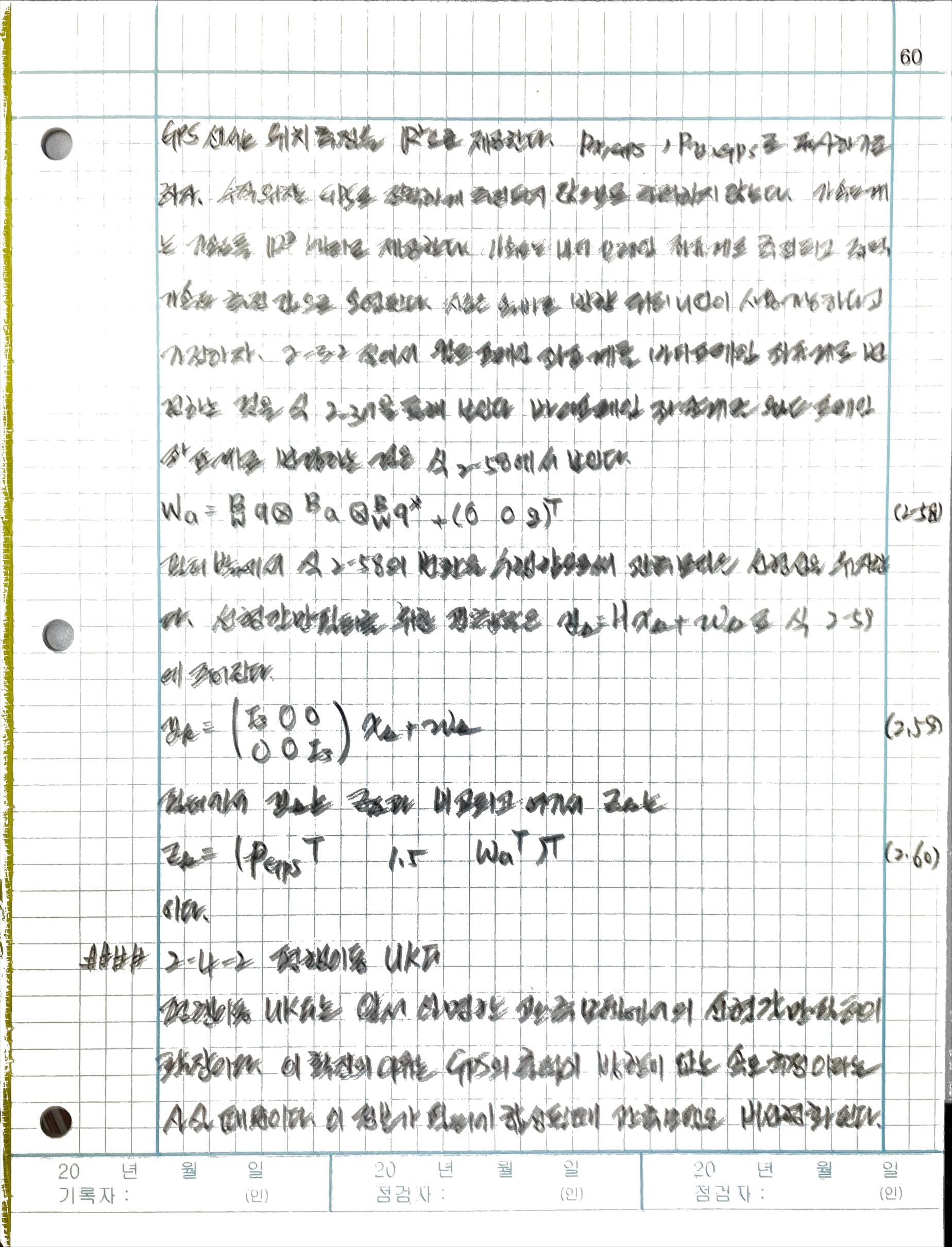
2-4-1 Linear Kalmann filter
2-4-2 Translation UKF
2-4-3 Rotation UKF
2-4-4 Full state
2-4-5 Filter Configuration